

Hunting for plastic: new digital technology to find and map marine litter
мая 21, 2021
When plastic first arrived on the scene, it was welcomed as a benefit for humanity. Fascinated, the French philosopher Roland Barthes envisioned “a plasticised world” in his book Mythologies (1957). Now Barthes’ vision has become reality, for better and worse, and enthusiasm for plastic has dwindled.
By: Frank Beuchel, Lionel Camus and Salve Dahle // Akvaplan-niva

Akvaplan-niva currently runs two major projects for litter mapping on shorelines and sea surface in Arctic Norway and Russia. In the project MALINOR (Mapping marine litter in the Norwegian and Russian Arctic Seas, financed by the Research Council of Norway) we use electrically powered aerial multicopter drones to validate novel technologies for mapping and predicting the quantity of accumulated litter.
This knowledge can be useful when planning beach-cleaning activities. We also investigate the potential of satellite images, using World View and Sentinel satellites to detect marine plastic debris on different beach types.
These data are verified against results from our drone mapping and ground sampling of litter.
The project DIMARC (Detecting, identifying, and mapping plastic in the Arctic using robotics and digital solutions), is funded by the Norwegian Retailers’ Environment Fund, the largest private environmental fund in Norway, which supports projects aimed at reducing plastic waste and increasing plastic recycling. An important task in this project is the detection of lost fishing gear on shorelines. Lines, nets, buoys, and other fishing gear account for up to 50% of all recorded beach litter and can be harmful to animals such as seals and birds.
ADVERTISEMENT

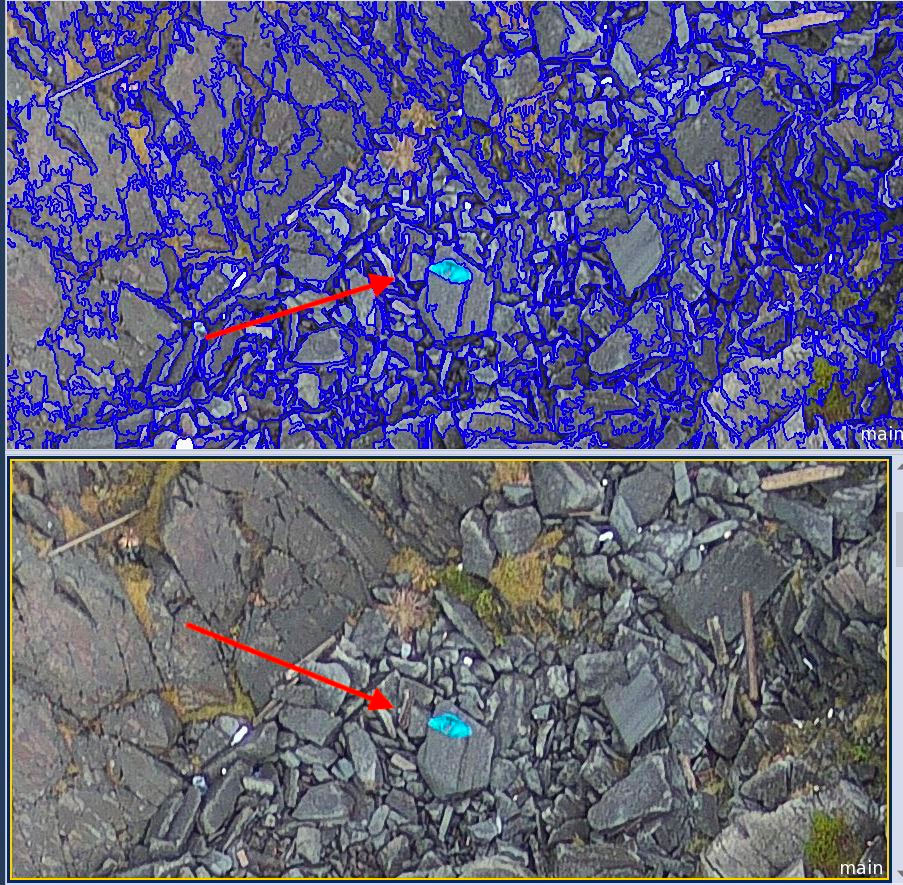
Efficient data management in analysis of photos relies on the application of machine learning algorithms. Automated routines to pre-select photos containing litter are being developed. The first results from using artificial intelligence to analyse satellite images clearly demonstrate that lost fishing gear can be detected and identified. From drone images, several types of plastic can be quantified, down to a size of a few centimetres.
In order to determine the probable sources, trajectories, and fate of plastic litter in both the MALINOR and DIMARC projects, we will use the high-resolution ocean current model FVCOM, developed by Akvaplan-niva for the Barents Sea.
Using different model scenarios, we can simulate the drift of surface litter in the open sea, and predict where we can expect to find accumulation zones for marine litter on shorelines.
The goal is to develop a predictive tool for litter distribution. Importantly, we will disseminate our findings to students, the public engaged in beach cleaning, and policy makers in Norway, Russia and internationally (EU, UNEP, Arctic Council). The results will be communicated to local communities to assist them in beach cleaning, and to students for educational purposes.
This story is originally published by the Fram Centre
Рассылка новостей Barents Observer
Будьте в курсе последних новостей нашего сайта! Подпишитесь на нашу рассылку новостей